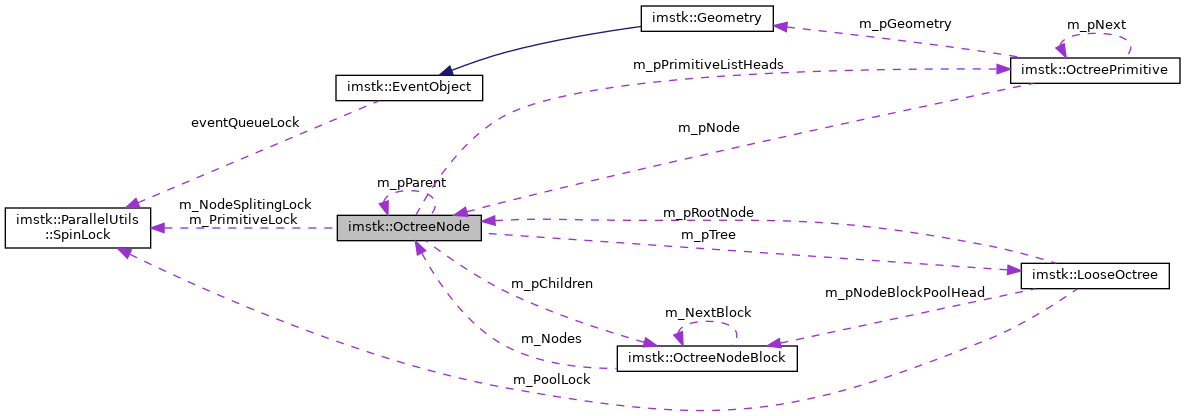
The OctreeNode class. More...
#include <imstkLooseOctree.h>
Public Member Functions | |
| OctreeNode (const OctreeNode &)=delete | |
| OctreeNode & | operator= (const OctreeNode &)=delete |
| OctreeNode () | |
| Dummy constructor, called only during memory allocation in memory pool. | |
| OctreeNode (LooseOctree *const tree, OctreeNode *const pParent, const Vec3d &nodeCenter, const double halfWidth, const uint32_t depth) | |
| OctreeNode constructor, called during node splitting when initializing children node. | |
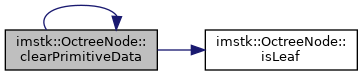
| bool | isLeaf () const |
| Check if this node is a leaf node. | |
| OctreeNode * | getChildNode (const uint32_t childIdx) const |
| Get a child node. More... | |
| OctreePrimitive * | getPrimitiveList (const OctreePrimitiveType type) const |
| For the given primitive type, return the head node of the primitive list of that type. | |
| uint32_t | getPrimitiveCount (const OctreePrimitiveType type) const |
| Get the number of primitives of the given type in this node. | |
| const Vec6d | getBounds () |
| Get the bounds of the node. | |
| const Vec6d | getLooseBounds () |
| Get the loose bounds of the node. | |
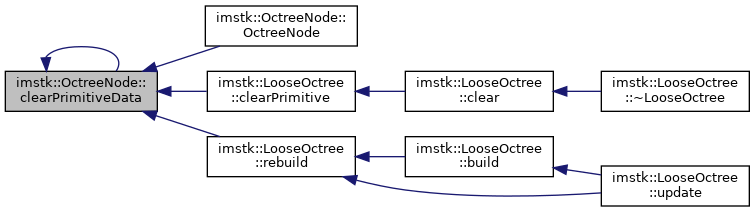
| void | clearPrimitiveData (const OctreePrimitiveType type) |
| Recursively clear primitive data (linked lists and counters) Note that the primitives are still exist in the octree primitive list, they are just removed from the node. More... | |
| void | split () |
| Split node (requesting 8 children nodes from memory pool) | |
| void | removeAllDescendants () |
| Recursively remove all descendant nodes (return them back to memory pool) As a result, after calling to this function, the current node will become a leaf node. | |
| void | removeEmptyDescendants () |
| Recursively remove all descendant nodes that do not contain primitives (all 8 children of a node are removed at the same time) | |
| void | keepPrimitive (OctreePrimitive *const pPrimitive, const OctreePrimitiveType type) |
| Keep the primitive at this node as cannot pass it down further to any child node. | |
| void | insertPoint (OctreePrimitive *const pPrimitive) |
| Insert a point primitive into the subtree in a top-down manner. | |
| void | insertNonPointPrimitive (OctreePrimitive *const pPrimitive, const OctreePrimitiveType type) |
| Insert a non-point primitive into the subtree in a top-down manner. | |
| bool | contains (const Vec3d &point) |
| Check if the given point is contained exactly in the node boundary (bounding box) | |
| bool | contains (const std::array< double, 3 > &point) |
| bool | contains (const double x, const double y, const double z) |
| bool | contains (const std::array< double, 3 > &lowerCorner, const std::array< double, 3 > &upperCorner) |
| Check if the given non-point primitive (triangle/analytical geometry) is exactly contained in the node boundary (bounding box) More... | |
| bool | looselyContains (const Vec3d &point) |
| Check if the given point is contained in the node loose boundary (which is 2X bigger than the bounding box) | |
| bool | looselyContains (const std::array< double, 3 > &point) |
| bool | looselyContains (const double x, const double y, const double z) |
| bool | looselyContains (const std::array< double, 3 > &lowerCorner, const std::array< double, 3 > &upperCorner) |
| Check if the given non-point primitive (triangle/analytical geometry) is contained in the node loose boundary (which is 2X bigger than the bounding box) More... | |
| bool | looselyOverlaps (const std::array< double, 3 > &lowerCorner, const std::array< double, 3 > &upperCorner) |
| Check if the bounding box of the given primitive (triangle/analytical geometry) overlaps with the loose boundary of this tree node (which is 2X bigger than the bounding box) More... | |
Public Attributes | |
| LooseOctree * | m_pTree |
| Pointer to the octree, used to request children from memory pool during splitting node. | |
| OctreeNode * | m_pParent |
| Pointer to the parent node. | |
| OctreeNodeBlock * | m_pChildren = nullptr |
| Pointer to a memory block containing 8 children nodes. | |
| const Vec3d | m_Center |
| Center of this node. | |
| const Vec3d | m_LowerBound |
| The AABB's lower corner of the node. | |
| const Vec3d | m_UpperBound |
| The AABB's upper corner of the node. | |
| const Vec3d | m_LowerExtendedBound |
| The extended AABB's lower corner of the node, which is 2X bigger than the exact AABB. | |
| const Vec3d | m_UpperExtendedBound |
| The extended AABB's upper corner of the node, which is 2X bigger than the exact AABB. | |
| const double | m_HalfWidth |
| Half width of the node AABB. | |
| const uint32_t | m_Depth |
| Depth of this node (depth > 0, depth = 1 starting at the root node) | |
| uint32_t | m_MaxDepth |
| Cache the max depth of the tree (maximum depth level possible) | |
| bool | m_bIsLeaf = true |
| True if this node does not have any child node (a node should have either 0 or 8 children) | |
| OctreePrimitive * | m_pPrimitiveListHeads [OctreePrimitiveType::NumPrimitiveTypes] |
| Heads of the link lists storing (Classified) primitives. | |
| uint32_t | m_PrimitiveCounts [OctreePrimitiveType::NumPrimitiveTypes] |
| Count the number of (classified) primitives stored in this node. | |
| ParallelUtils::SpinLock | m_PrimitiveLock [OctreePrimitiveType::NumPrimitiveTypes] |
| Mutex lock for thread-safe primitive list modification. | |
| ParallelUtils::SpinLock | m_NodeSplitingLock |
| Mutex lock for thread-safe splitting node. | |
Friends | |
| class | LooseOctree |
| class | OctreeBasedCD |
| class | LooseOctreeTest |
Detailed Description
The OctreeNode class.
Definition at line 83 of file imstkLooseOctree.h.
Member Function Documentation
◆ clearPrimitiveData()
| void imstk::OctreeNode::clearPrimitiveData | ( | const OctreePrimitiveType | type | ) |
Recursively clear primitive data (linked lists and counters) Note that the primitives are still exist in the octree primitive list, they are just removed from the node.
- Parameters
-
type The type of primitives that will be clear
Definition at line 44 of file imstkLooseOctree.cpp.
◆ contains()
|
inline |
Check if the given non-point primitive (triangle/analytical geometry) is exactly contained in the node boundary (bounding box)
- Parameters
-
lowerCorner The AABB's lower corner of the primitive upperCorner The AABB's upper corner of the primitive
Definition at line 209 of file imstkLooseOctree.h.
◆ getChildNode()
| OctreeNode * imstk::OctreeNode::getChildNode | ( | const uint32_t | childIdx | ) | const |
Get a child node.
- Parameters
-
childIdx The index of child node (from 0 to 7)
Definition at line 35 of file imstkLooseOctree.cpp.
◆ looselyContains()
|
inline |
Check if the given non-point primitive (triangle/analytical geometry) is contained in the node loose boundary (which is 2X bigger than the bounding box)
- Parameters
-
lowerCorner The AABB's lower corner of the primitive upperCorner The AABB's upper corner of the primitive
Definition at line 240 of file imstkLooseOctree.h.
◆ looselyOverlaps()
|
inline |
Check if the bounding box of the given primitive (triangle/analytical geometry) overlaps with the loose boundary of this tree node (which is 2X bigger than the bounding box)
- Parameters
-
lowerCorner The AABB's lower corner of the primitive upperCorner The AABB's upper corner of the primitive
Definition at line 256 of file imstkLooseOctree.h.
The documentation for this class was generated from the following files:
- Source/DataStructures/imstkLooseOctree.h
- Source/DataStructures/imstkLooseOctree.cpp
