This class defines grasping of a PbdObject via different picking methods. Where grasping is define as grabbing & attaching of a PbdObject's mesh to points. More...
#include <imstkPbdObjectGrasping.h>
Public Types | |
| enum | GraspMode { Vertex, Cell, RayPoint, RayCell } |
 Public Types inherited from imstk::EventObject Public Types inherited from imstk::EventObject | |
| using | Observer = std::tuple< bool, std::weak_ptr< EventObject >, std::function< void(Event *)> > |
Public Member Functions | |
| PbdObjectGrasping (std::shared_ptr< PbdObject > graspedObject, std::shared_ptr< PbdObject > grasperObject=nullptr) | |
| Construct PbdObjectGrasping with a object to grasp and and optionally an object that does the grasping. Whilst grasping can work with any grasping criteria, if you want a two-way response you must supply an object to grasp with. | |
| void | beginVertexGrasp (std::shared_ptr< AnalyticalGeometry > geometry) |
| Begin a vertex grasp (picking will begin on the next update) More... | |
| void | beginCellGrasp (std::shared_ptr< AnalyticalGeometry > geometry, std::string cdType="") |
| Begin a cell grasp (picking will begin on the next update) Also works for rigid on rigid. More... | |
| void | beginRayPointGrasp (std::shared_ptr< AnalyticalGeometry > geometry, const Vec3d &rayStart, const Vec3d &rayDir, const double maxDist=-1.0) |
| Begin a ray point grasp (picking will begin on the next update) More... | |
| void | beginRayCellGrasp (std::shared_ptr< AnalyticalGeometry > geometry, const Vec3d &rayStart, const Vec3d &rayDir, const double maxDist=-1.0) |
| Begin a ray point grasp (picking will begin on the next update) More... | |
| void | regrasp () |
| if you already started a grasp, recalculates grasping points As the currently grasped points are already constrained to the object this will capture those point plus any new candidates | |
| void | endGrasp () |
| End a grasp (picking will end on next update) | |
| void | addPickConstraints () |
| Compute/generate the constraints for picking. | |
| void | removePickConstraints () |
| Remove the constraints for picking. | |
| virtual void | addPointToPointConstraint (const std::vector< PbdParticleId > &ptsA, const std::vector< double > &weightsA, const std::vector< PbdParticleId > &ptsB, const std::vector< double > &weightsB, const double stiffnessA, const double stiffnessB) |
| Add constraint between a point on each element given via barycentric coordinates pt position = weightA_0 * ptsA_0 + weightA_1 * ptsA_1 + ... | |
| virtual void | addBodyToBodyConstraint (const PbdParticleId &graspedBodyId, const PbdParticleId &grasperBodyId, const Vec3d &pointOnBodies, const double compliance) |
| Add 0 distance constraint between two points defined on two separate bodies. | |
| virtual void | addPointToBodyConstraint (const PbdParticleId &graspedParticleId, const PbdParticleId &grasperBodyId, const Vec3d &pointOnBody, const double compliance) |
| Add a 0 distance constraint between a deformable point and a point on a body. | |
| void | setGeometryToPick (std::shared_ptr< Geometry > geomToPick, std::shared_ptr< PointwiseMap > map) |
| Set a different geometry to pick with and a mapping back to the physics geometry to select the correct vertices. | |
| std::shared_ptr< TaskNode > | getPickingNode () const |
| void | initGraphEdges (std::shared_ptr< TaskNode > source, std::shared_ptr< TaskNode > sink) override |
| Setup connectivity of the compute graph. | |
| bool | hasConstraints () const |
| Returns if any grasp constraints are present. | |
| bool | getGraspState () const |
| Returns true if currently grasping, else false. | |
| void | setStiffness (const double stiffness) |
| Set/Get the stiffness, 0-1 value that alters the step size in the solver. | |
| double | getStiffness () const |
| void | setCompliance (const double compliance) |
| Set/Get the compliance. | |
| double | getCompliance () const |
| void | setPickingAlgorithm (std::shared_ptr< PickingAlgorithm > pickMethod) |
| Get/Set the method use for picking, default is CellPicker. | |
| std::shared_ptr< PickingAlgorithm > | getPickingAlgorithm () const |
| Public Member Functions inherited from imstk::SceneObject | |
| SceneObject (const std::string &name="SceneObject") | |
| std::shared_ptr< TaskGraph > | getTaskGraph () const |
| Get the computational graph. | |
| std::shared_ptr< Geometry > | getVisualGeometry () const |
| Sets the visual geometry, adds (sets the first) VisualModel. | |
| void | setVisualGeometry (std::shared_ptr< Geometry > geometry) |
| std::shared_ptr< VisualModel > | getVisualModel (const int index) const |
| Get/add visual model. | |
| void | addVisualModel (std::shared_ptr< VisualModel > visualModel) |
| void | removeVisualModel (std::shared_ptr< VisualModel > visualModel) |
| std::shared_ptr< TaskNode > | getUpdateNode () const |
| Returns the computational node for updating. | |
| std::shared_ptr< TaskNode > | getUpdateGeometryNode () const |
| Returns the computational node for updating geometry. | |
| virtual void | update () |
| Update the SceneObject, called during scene update. | |
| virtual void | visualUpdate () |
| Update the visuals, called before render. | |
| virtual void | updateGeometries () |
| Update the geometries. | |
| virtual bool | initialize () |
| Initialize the scene object. | |
| void | initGraphEdges () |
| Initializes the edges of the SceneObject's computational graph. | |
| virtual void | reset () |
| Public Member Functions inherited from imstk::Entity | |
| Entity (const std::string &name="Entity") | |
| SIGNAL (Entity, modified) | |
| EntityID | getID () const |
| Get ID (ALWAYS query the ID in your code, DO NOT hardcode it) More... | |
| virtual const std::string | getTypeName () const |
| template<typename T > | |
| std::shared_ptr< T > | addComponent () |
| Create and return a component on this entity. | |
| template<typename T > | |
| std::shared_ptr< T > | addComponent (std::string name) |
| void | addComponent (std::shared_ptr< Component > component) |
| Add existing component to entity. | |
| std::shared_ptr< Component > | getComponent (const unsigned int index) const |
| Get a component by index. | |
| template<typename T > | |
| std::shared_ptr< T > | getComponent () const |
| Get the first component of type T. | |
| template<typename T > | |
| std::shared_ptr< T > | getComponentN (const int index) const |
| Get's the Nth component of type T. | |
| template<class T > | |
| bool | containsComponent () const |
| Check if contains component of type T. | |
| bool | containsComponent (std::shared_ptr< Component > component) const |
| Check if contains given component. | |
| template<typename T > | |
| std::vector< std::shared_ptr< T > > | getComponents () const |
| Get all components of type T. | |
| const std::vector< std::shared_ptr< Component > > & | getComponents () |
| void | removeComponent (std::shared_ptr< Component > component) |
| Remove component if it exists. | |
| const std::string & | getName () const |
| Get/Set the name of the entity. | |
| void | setName (const std::string &name) |
| Public Member Functions inherited from imstk::EventObject | |
| template<typename T > | |
| void | postEvent (const T &e) |
| Emits the event Direct observers will be immediately called, in sync Queued observers will receive the Command in their queue for later execution, reciever must implement doEvent. | |
| template<typename T > | |
| void | queueEvent (const T &e) |
| Queues event directly to this. | |
| void | doEvent () |
| Do an event, if none exists return. | |
| void | doAllEvents () |
| Do all the events in the event queue. | |
| void | foreachEvent (std::function< void(Command cmd)> func) |
| Thread safe loop over all event commands, one can implement a custom handler. | |
| void | rforeachEvent (std::function< void(Command cmd)> func) |
| thread safe reverse loop over all event commands, one can implement a custom handler | |
| void | clearEvents () |
| Removes all events from queue cleans up copies of the event. | |
Protected Member Functions | |
| virtual void | updatePicking () |
| Update picking state, this should move grasp points. | |
| void | updateConstraints () |
| Update the constraints used for picking. | |
| Protected Member Functions inherited from imstk::SceneObject | |
| virtual void | postModifiedAll () |
| Posts modified for all geometries. | |
Protected Attributes | |
| std::shared_ptr< TaskNode > | m_pickingNode = nullptr |
| std::shared_ptr< Geometry > | m_geomToPick = nullptr |
| std::shared_ptr< PointwiseMap > | m_geometryToPickMap = nullptr |
| std::shared_ptr< PbdObject > | m_objectToGrasp = nullptr |
| std::shared_ptr< PbdObject > | m_grasperObject = nullptr |
| std::shared_ptr< AnalyticalGeometry > | m_graspGeom = nullptr |
| std::shared_ptr< PickingAlgorithm > | m_pickMethod = nullptr |
| GraspMode | m_graspMode = GraspMode::Cell |
| bool | m_isGrasping = false |
| bool | m_regrasp = false |
| Add grasped points to the current grasp. | |
| bool | m_isPrevGrasping = false |
| double | m_stiffness = 0.4 |
| double | m_compliance = 0.0001 |
| std::vector< std::tuple< PbdParticleId, Vec3d > > | m_constraintPts |
| Vec of virtual particle grasp point ids, and local positions when grasped. | |
| std::vector< std::shared_ptr< PbdConstraint > > | m_constraints |
| List of PBD constraints. | |
| Protected Attributes inherited from imstk::SceneObject | |
| std::shared_ptr< TaskGraph > | m_taskGraph = nullptr |
| Computational Graph. | |
| Protected Attributes inherited from imstk::Entity | |
| std::vector< std::shared_ptr< Component > > | m_components |
| EntityID | m_ID |
| unique ID of entity | |
| std::string | m_name |
| Not unique name. | |
| Protected Attributes inherited from imstk::EventObject | |
| ParallelUtils::SpinLock | eventQueueLock |
| std::deque< Command > | eventQueue |
| std::vector< std::pair< std::string, std::vector< Observer > > > | queuedObservers |
| std::vector< std::pair< std::string, std::vector< Observer > > > | directObservers |
Additional Inherited Members | |
| Static Protected Attributes inherited from imstk::Entity | |
| static std::atomic< EntityID > | m_count { 0 } |
| current count of entities | |
Detailed Description
This class defines grasping of a PbdObject via different picking methods. Where grasping is define as grabbing & attaching of a PbdObject's mesh to points.
Given an input PickData the appropriate grasping will be produced.
Definition at line 32 of file imstkPbdObjectGrasping.h.
Member Function Documentation
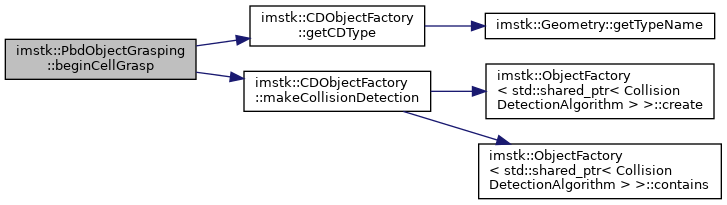
◆ beginCellGrasp()
| void imstk::PbdObjectGrasping::beginCellGrasp | ( | std::shared_ptr< AnalyticalGeometry > | geometry, |
| std::string | cdType = "" |
||
| ) |
Begin a cell grasp (picking will begin on the next update) Also works for rigid on rigid.
- Parameters
-
Geometry attached/grasped too The intersection type/class name
Definition at line 247 of file imstkPbdObjectGrasping.cpp.

◆ beginRayCellGrasp()
| void imstk::PbdObjectGrasping::beginRayCellGrasp | ( | std::shared_ptr< AnalyticalGeometry > | geometry, |
| const Vec3d & | rayStart, | ||
| const Vec3d & | rayDir, | ||
| const double | maxDist = -1.0 |
||
| ) |
Begin a ray point grasp (picking will begin on the next update)
- Parameters
-
Geometry attached/grasped too Global space ray start Global space ray direction
Definition at line 284 of file imstkPbdObjectGrasping.cpp.

◆ beginRayPointGrasp()
| void imstk::PbdObjectGrasping::beginRayPointGrasp | ( | std::shared_ptr< AnalyticalGeometry > | geometry, |
| const Vec3d & | rayStart, | ||
| const Vec3d & | rayDir, | ||
| const double | maxDist = -1.0 |
||
| ) |
Begin a ray point grasp (picking will begin on the next update)
- Parameters
-
Geometry attached/grasped too Global space ray start Global space ray direction
Definition at line 271 of file imstkPbdObjectGrasping.cpp.

◆ beginVertexGrasp()
| void imstk::PbdObjectGrasping::beginVertexGrasp | ( | std::shared_ptr< AnalyticalGeometry > | geometry | ) |
Begin a vertex grasp (picking will begin on the next update)
- Parameters
-
Geometry attached/grasped too
Definition at line 234 of file imstkPbdObjectGrasping.cpp.

Member Data Documentation
◆ m_stiffness
|
protected |
Stiffness of grasp, when 1 the position is completely moved too the grasp point when stiffness < 1 it will slowly converge on the grasp point
Definition at line 218 of file imstkPbdObjectGrasping.h.
The documentation for this class was generated from the following files:
- Source/Scene/imstkPbdObjectGrasping.h
- Source/Scene/imstkPbdObjectGrasping.cpp
