This class implements once tracking controller controlling one scene object. More...
#include <imstkSceneObjectController.h>
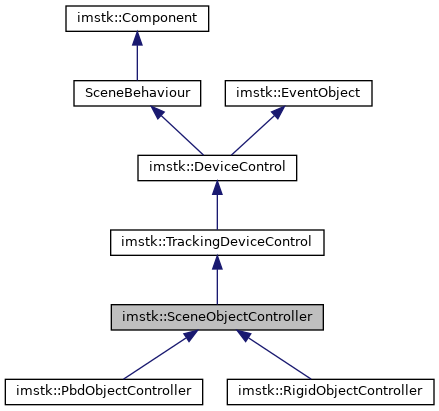
Inheritance diagram for imstk::SceneObjectController:
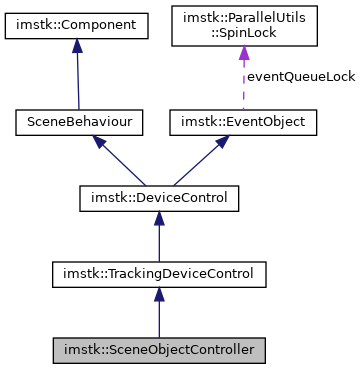
Collaboration diagram for imstk::SceneObjectController:
Public Member Functions | |
| SceneObjectController (const std::string &name="SceneObjectController") | |
| void | update (const double &dt) override |
| Update controlled scene object using latest tracking information. | |
| std::shared_ptr< SceneObject > | getControlledObject () const |
| Get/Set controlled scene object. | |
| virtual void | setControlledObject (std::shared_ptr< SceneObject > so) |
 Public Member Functions inherited from imstk::TrackingDeviceControl Public Member Functions inherited from imstk::TrackingDeviceControl | |
| virtual void | applyForces () |
| Apply forces to the haptic device. | |
| const Quatd & | getEffectorRotationOffset () |
| Get/Set the roation applied to the end effector, this can be used to register the device in virtual space with regard to the users point of view. | |
| void | setEffectorRotationOffset (const Quatd &r) |
| virtual bool | updateTrackingData (const double dt) |
| Update tracking data. | |
| const Vec3d & | getPosition () const |
| Set/Get the position of the tracker. | |
| void | setPosition (const Vec3d &pos) |
| const Quatd & | getOrientation () const |
| Set/Get the orientation of the tracker. | |
| void | setOrientation (const Quatd &orientation) |
| void | setComputeVelocity (const bool computeVelocity) |
| Set/Get whether to compute the velocity from previous and current samples Useful if a device does not provide the quantity. | |
| bool | getComputeVelocity () const |
| void | setComputeAngularVelocity (const bool computeAngularVelocity) |
| Set/Get whether to compute the anular velocity from previous and current samples Useful if the device does not provide the quantity. | |
| bool | getComputeAngularVelocity () const |
| const Vec3d & | getAngularVelocity () const |
| Get/Set the angular velocity. | |
| void | setAngularVelocity (const Vec3d &angularVelocity) |
| const Vec3d & | getVelocity () const |
| Get/Set the linear velocity. | |
| void | setVelocity (const Vec3d &velocity) |
| double | getTranslationScaling () const |
| Get/Set the current scaling factor. | |
| void | setTranslationScaling (const double scaling) |
| const Vec3d & | getTranslationOffset () const |
| Get/Set the translation offset. | |
| void | setTranslationOffset (const Vec3d &t) |
| const Quatd & | getRotationOffset () |
| Get/Set the rotation offset, this rotation is applied to the overall device coordinate system. | |
| void | setRotationOffset (const Quatd &r) |
| unsigned char | getInversionFlags () |
| Get/Set the inversion flags, when set the corresponding axis coordinates or rotation angle will be negated. | |
| void | setInversionFlags (const unsigned char f) |
| Public Member Functions inherited from imstk::DeviceControl | |
| SIGNAL (DeviceControl, modified) | |
| virtual void | printControls () |
| Prints the controls. | |
| std::shared_ptr< DeviceClient > | getDevice () const |
| Set/Get the device client used in the control. | |
| virtual void | setDevice (std::shared_ptr< DeviceClient > device) |
| Public Member Functions inherited from imstk::Behaviour< UpdateInfo > | |
| virtual void | update (const UpdateInfo &imstkNotUsed(updateData)) |
| virtual void | visualUpdate (const UpdateInfo &imstkNotUsed(updateData)) |
| void | initTaskGraphEdges () |
| Setup the edges/connections of the TaskGraph. | |
| std::shared_ptr< TaskGraph > | getTaskGraph () const |
| Public Member Functions inherited from imstk::Component | |
| const std::string & | getName () const |
| void | setName (const std::string &name) |
| std::weak_ptr< Entity > | getEntity () const |
| Get parent entity. | |
| void | initialize () |
| Initialize the component, called at a later time after all component construction is complete. | |
| Public Member Functions inherited from imstk::EventObject | |
| template<typename T > | |
| void | postEvent (const T &e) |
| Emits the event Direct observers will be immediately called, in sync Queued observers will receive the Command in their queue for later execution, reciever must implement doEvent. | |
| template<typename T > | |
| void | queueEvent (const T &e) |
| Queues event directly to this. | |
| void | doEvent () |
| Do an event, if none exists return. | |
| void | doAllEvents () |
| Do all the events in the event queue. | |
| void | foreachEvent (std::function< void(Command cmd)> func) |
| Thread safe loop over all event commands, one can implement a custom handler. | |
| void | rforeachEvent (std::function< void(Command cmd)> func) |
| thread safe reverse loop over all event commands, one can implement a custom handler | |
| void | clearEvents () |
| Removes all events from queue cleans up copies of the event. | |
Protected Attributes | |
| std::shared_ptr< SceneObject > | m_sceneObject |
| SceneObject controlled by the Tracker. | |
| Protected Attributes inherited from imstk::TrackingDeviceControl | |
| double | m_scaling = 1.0 |
| Scaling factor for physical to virtual translations. | |
| Vec3d | m_translationOffset = Vec3d::Zero() |
| Translation concatenated to the device translation. | |
| Quatd | m_rotationOffset = Quatd::Identity() |
| Rotation concatenated to the device rotation. | |
| Quatd | m_effectorRotationOffset = Quatd::Identity() |
| Rotation prefixed to the device rotation. | |
| unsigned char | m_invertFlags = 0x00 |
| Invert flags to be masked with DeviceTracker::InvertFlag. | |
| Vec3d | m_currentPos = Vec3d::Zero() |
| Quatd | m_currentOrientation = Quatd::Identity() |
| Vec3d | m_currentVelocity = Vec3d::Zero() |
| Vec3d | m_currentAngularVelocity = Vec3d::Zero() |
| Vec3d | m_currentDisplacement = Vec3d::Zero() |
| Quatd | m_currentRotation = Quatd::Identity() |
| bool | m_computeVelocity = false |
| If true, will use current and previous positions to produce velocity, if off, will ask device for velocity. | |
| bool | m_computeAngularVelocity = false |
| If true, will use current and previous rotations to produce angular velocity, if off, will ask device for angular velocity. | |
| Protected Attributes inherited from imstk::DeviceControl | |
| std::shared_ptr< DeviceClient > | m_deviceClient |
| Protected Attributes inherited from imstk::Behaviour< UpdateInfo > | |
| std::shared_ptr< TaskGraph > | m_taskGraph = nullptr |
| Protected Attributes inherited from imstk::Component | |
| std::string | m_name |
| std::weak_ptr< Entity > | m_entity |
| Parent entity this component exists on. | |
| Protected Attributes inherited from imstk::EventObject | |
| ParallelUtils::SpinLock | eventQueueLock |
| std::deque< Command > | eventQueue |
| std::vector< std::pair< std::string, std::vector< Observer > > > | queuedObservers |
| std::vector< std::pair< std::string, std::vector< Observer > > > | directObservers |
Additional Inherited Members | |
| Public Types inherited from imstk::TrackingDeviceControl | |
| enum | InvertFlag { transX = 0x01, transY = 0x02, transZ = 0x04, rotX = 0x08, rotY = 0x10, rotZ = 0x20 } |
| Public Types inherited from imstk::EventObject | |
| using | Observer = std::tuple< bool, std::weak_ptr< EventObject >, std::function< void(Event *)> > |
| Protected Member Functions inherited from imstk::TrackingDeviceControl | |
| TrackingDeviceControl (const std::string &name="TrackingDeviceControl") | |
| Protected Member Functions inherited from imstk::DeviceControl | |
| DeviceControl (const std::string &name="DeviceControl") | |
| Protected Member Functions inherited from imstk::Behaviour< UpdateInfo > | |
| Behaviour (const std::string &name="Behaviour") | |
| Behaviour (const bool useTaskGraph, const std::string &name="Behaviour") | |
| virtual void | initGraphEdges (std::shared_ptr< TaskNode > imstkNotUsed(source), std::shared_ptr< TaskNode > imstkNotUsed(sink)) |
| Setup the edges/connections of the TaskGraph. More... | |
| Protected Member Functions inherited from imstk::Component | |
| Component (const std::string &name="Component") | |
| virtual void | init () |
| Initialize the component, called at a later time after all component construction is complete. | |
Detailed Description
This class implements once tracking controller controlling one scene object.
Definition at line 22 of file imstkSceneObjectController.h.
The documentation for this class was generated from the following files:
- Source/Controllers/imstkSceneObjectController.h
- Source/Controllers/imstkSceneObjectController.cpp
