Surface collision disabled upon puncture. More...
#include <NeedlePbdCH.h>
Inheritance diagram for NeedlePbdCH:
Collaboration diagram for NeedlePbdCH:
Protected Member Functions | |
| void | handle (const std::vector< CollisionElement > &elementsA, const std::vector< CollisionElement > &elementsB) override |
| Handle the input collision data. Elements will be flipped (if needed) such that elementsA corresponds with inputObjectA and B with inputObjectB in the case CD is backwards from CH. More... | |
 Protected Member Functions inherited from imstk::PbdCollisionHandling Protected Member Functions inherited from imstk::PbdCollisionHandling | |
| std::array< PbdParticleId, 2 > | getEdge (const CollisionElement &elem, const CollisionSideData &side) |
| std::array< PbdParticleId, 3 > | getTriangle (const CollisionElement &elem, const CollisionSideData &side) |
| std::array< PbdParticleId, 1 > | getVertex (const CollisionElement &elem, const CollisionSideData &side) |
| getVertex takes slightly differing paths than the others, as the cell vertex directly refers to the vertex buffer, not an index buffer | |
| CollisionSideData | getDataFromObject (std::shared_ptr< CollidingObject > obj) |
| Creates a CollisionSideData struct from the provided object, this gives all the info needed to response to collision. | |
| PbdContactCase | getCaseFromElement (const ColElemSide &elem) |
| Get the contact case from the collision element and data as additional context. | |
| void | handle (const std::vector< CollisionElement > &elementsA, const std::vector< CollisionElement > &elementsB) override |
| Add collision constraints based off contact data. | |
| void | handleElementPair (ColElemSide sideA, ColElemSide sideB) |
| Handle a single element. | |
| virtual void | addConstraint_Body_V (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_Body_E (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_Body_T (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_Body_Body (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_V_T (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_E_E (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_E_E_CCD (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_V_E (const ColElemSide &sideA, const ColElemSide &sideB) |
| virtual void | addConstraint_V_V (const ColElemSide &sideA, const ColElemSide &sideB) |
| template<class T > | |
| T * | getCachedConstraint (ConstraintType type) |
| Protected Member Functions inherited from imstk::CollisionHandling | |
| void | updateCollisionData (std::shared_ptr< const CollisionData > data) |
Additional Inherited Members | |
| Public Types inherited from imstk::PbdCollisionHandling | |
| enum | ObjType { PbdDeformable, PbdRigid, Colliding } |
| Public Member Functions inherited from imstk::PbdCollisionHandling | |
| const std::vector< PbdConstraint * > & | getConstraints () const |
| Return the constraints generated by this handler This list of constraints is ordered in orderCollisionConstraints. | |
| std::pair< PbdParticleId, Vec3d > | getBodyAndContactPoint (const CollisionElement &elem, const CollisionSideData &data) |
| Get the body particle id from the collision side as well as the contact point on the body (in global space) | |
| double | getRestitution () const |
| Get/Set the restitution, which gives how much velocity is removed along the contact normals during contact. | |
| void | setRestitution (const double restitution) |
| double | getFriction () const |
| Get/Set the friction, which gives how much velocity is removed along the tangents during contact. | |
| void | setFriction (const double friction) |
| bool | getUseCorrectVelocity () const |
| Get/Set whether velocity is corrected (in some cases this could cause instabilities) | |
| void | setUseCorrectVelocity (const bool useCorrectVelocity) |
| int | getCCDSubsteps () const |
| Get/Set the number of substeps used in CCD constraints. | |
| void | setCCDSubsteps (const int ccdSubsteps) |
| void | setEnableBoundaryCollisions (const bool enableBoundaryCollisions) |
| Get enableBoundaryCollision. | |
| const bool | getEnableBoundaryCollisions () const |
| void | setRigidBodyCompliance (const double compliance) |
| Get/Set compliance of rigid body contacts. Defaults to 0 compliance/infinitely stiff. This is what is needed most of the time but sometimes making a contact a bit softer can be helpful. | |
| double | getRigidBodyCompliance () const |
| void | setDeformableStiffnessA (const double stiffness) |
| Get/Set stiffness of deformable contacts. Defaults to 1.0. This is what is needed most of the time but sometimes making a contact a bit softer can be helpful. | |
| double | getDeformableStiffnessA () const |
| void | setDeformableStiffnessB (const double stiffness) |
| double | getDeformableStiffnessB () const |
| Public Member Functions inherited from imstk::CollisionHandling | |
| virtual const std::string | getTypeName () const =0 |
| void | setInputObjectA (std::shared_ptr< CollidingObject > objectA) |
| Set the input objects. | |
| void | setInputObjectB (std::shared_ptr< CollidingObject > objectB) |
| std::shared_ptr< CollidingObject > | getInputObjectA () const |
| Get the input objects. | |
| std::shared_ptr< CollidingObject > | getInputObjectB () const |
| virtual std::shared_ptr< Geometry > | getHandlingGeometryA () |
| Get the geometry used for handling defaults to the collision geometry. | |
| virtual std::shared_ptr< Geometry > | getHandlingGeometryB () |
| void | setInputCollisionData (std::shared_ptr< CollisionData > collisionData) |
| Set/Get the input collision data used for handling. | |
| void | setInputCollisionData (std::shared_ptr< std::vector< std::shared_ptr< CollisionData >>> collisionVectorData) |
| Set/Get the input collision data used for handling This supports collating information from multiple collision detect algorithms. | |
| std::shared_ptr< const CollisionData > | getInputCollisionData () const |
| void | update () |
| Handle the input collision data. | |
| Protected Types inherited from imstk::PbdCollisionHandling | |
| enum | ConstraintType { BodyBody = 0, BodyVertex, BodyEdge, BodyTriangle, VertexVertex, VertexEdge, EdgeEdge, VertexTriangle, EdgeEdgeCCD, NumTypes } |
| Protected Attributes inherited from imstk::PbdCollisionHandling | |
| std::vector< PbdConstraint * > | m_constraintBins [NumTypes] |
| std::vector< PbdConstraint * > | m_constraintCache [NumTypes] |
| std::vector< PbdConstraint * > | m_collisionConstraints |
| Vector of all collision constraints. | |
| std::unordered_map< PbdCHTableKey, std::function< void(const ColElemSide &elemA, const ColElemSide &elemB)> > | m_funcTable |
| Protected Attributes inherited from imstk::CollisionHandling | |
| std::shared_ptr< CollidingObject > | m_inputObjectA |
| std::shared_ptr< CollidingObject > | m_inputObjectB |
| std::shared_ptr< const CollisionData > | m_colData |
| Collision data. | |
| std::shared_ptr< std::vector< std::shared_ptr< CollisionData > > > | m_colVectorData |
| Expansion to allow collision detection to return multiple types of collision data. | |
| std::function< void()> | m_updateFunction = []() {} |
| bool | m_clearData = true |
| bool | m_processConstraints = true |
Detailed Description
Surface collision disabled upon puncture.
Definition at line 21 of file NeedlePbdCH.h.
Member Function Documentation
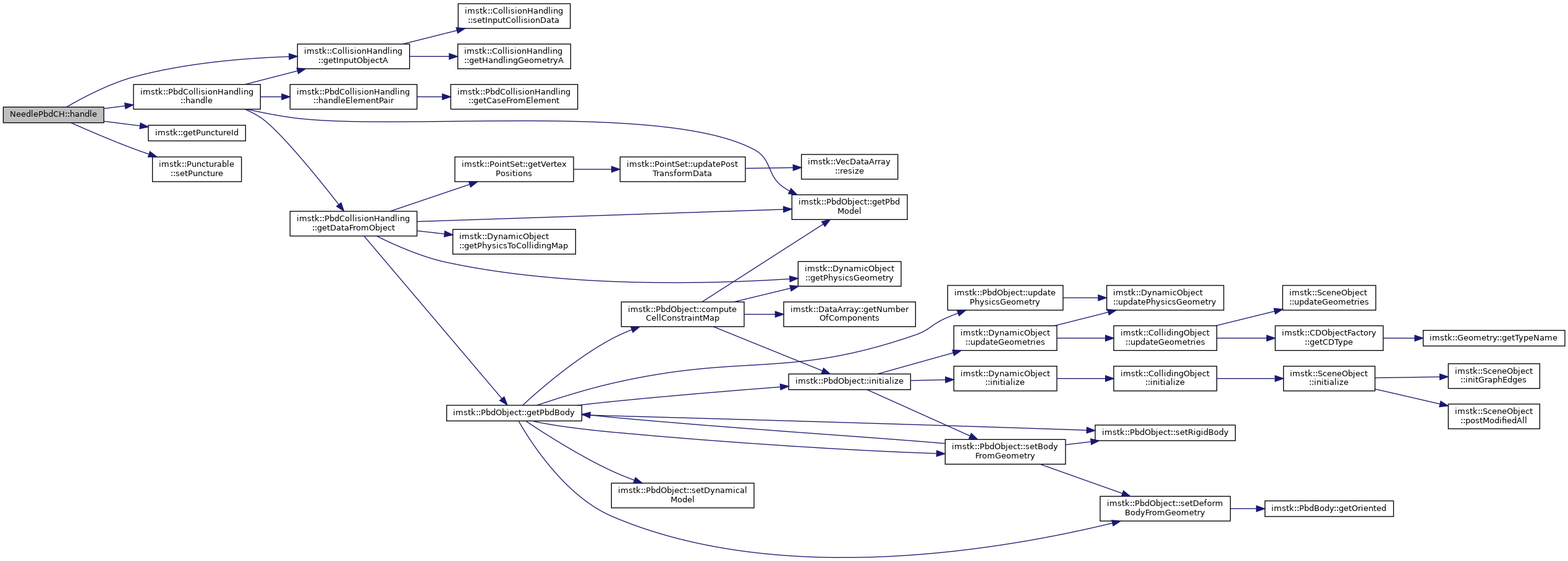
◆ handle()
|
inlineoverrideprotectedvirtual |
Handle the input collision data. Elements will be flipped (if needed) such that elementsA corresponds with inputObjectA and B with inputObjectB in the case CD is backwards from CH.
- Parameters
-
CD elements to resolve geomA CD elements to resolve geomB
Implements imstk::CollisionHandling.
Definition at line 30 of file NeedlePbdCH.h.
Here is the call graph for this function:
The documentation for this class was generated from the following file:
- Examples/PBD/PBDTissueSurfaceNeedleContact/NeedlePbdCH.h
