Allows setting the pose of the device from external caller without a real device connected. More...
#include <imstkProgrammableClient.h>
Classes | |
| struct | CircularMovement |
| Command for circular movement of an analytical geometry. More... | |
| struct | Command |
| General struct for command. Command will call activate when start time is reached, call updateDevice while active, and call complete when duration is over. More... | |
| struct | Deformation |
| Command for applying deformationt to a subset of vertices from an object. More... | |
| struct | GraspAction |
| Command for grasping an object. More... | |
| struct | HoldCommand |
| Command for holding a subset of vertices at a specific position. More... | |
| struct | LinearMovement |
| Command for linear movement of an analytical geometry. More... | |
| struct | LinearVertexMovement |
| Command for linear movement of a subset of vertices from an object. More... | |
| struct | WaitCommand |
| Command for waiting. Used to let system continue running with no active commands. More... | |
Public Types | |
| enum | DeformationType { Compression, Tension, SimpleShear, PureShear } |
| Enum for type of deformation. | |
 Public Types inherited from imstk::EventObject Public Types inherited from imstk::EventObject | |
| using | Observer = std::tuple< bool, std::weak_ptr< EventObject >, std::function< void(Event *)> > |
Public Member Functions | |
| ProgrammableClient (const std::string &name="") | |
| Constructor. | |
| ~ProgrammableClient () override | |
| Destructor. | |
| void | setDeltaTime (double dt) |
| Set the dt of the system. Should be the same as the simulation dt. | |
| void | update () override |
| Update all commands. | |
| bool | addLinearMovement (Vec3d startPos, Vec3d stopPos, double startTime, double duration) |
| Add a linear movement command to run. More... | |
| bool | addCircularMovement (Vec3d startPos, Vec3d centerPos, double startTime, double duration) |
| Add a circular movement command to run. More... | |
| bool | addGrasping (std::shared_ptr< PbdObject > tool, std::shared_ptr< PbdObjectGrasping > objectGrasping, double startTime, double duration) |
| Add a grasp command to run. More... | |
| bool | addLinearVertexMovement (std::shared_ptr< PbdObject > object, std::vector< int > vertexIds, Vec3d translation, std::vector< bool > pin, double startTime, double duration) |
| Add a linear vertex movement command to run. More... | |
| bool | addDeformation (std::shared_ptr< PbdObject > object, std::vector< int > initPos, double strain, DeformationType defType, double poisson, std::vector< bool > pin, double startTime, double duration) |
| Add a defomation command to run. More... | |
| std::vector< int > | findVertex (std::shared_ptr< PointSet > mesh, std::vector< Vec3d > initPos) |
| bool | addWaitCommand (double startTime, double duration) |
| Add a wait command to run. More... | |
| bool | addHoldCommand (std::shared_ptr< PbdObject > object, double startTime, double duration, std::vector< int > vertexIds) |
| Add a hold command to run. More... | |
| double | getTotalDuration () |
| Returns to total duration of all commands. | |
| bool | isFinished () |
| Returns true if all commands have finished executing. Returns false otherwise. | |
| void | setOrientation (Quatd temp) |
| Public Member Functions inherited from imstk::DeviceClient | |
| SIGNAL (DeviceClient, buttonStateChanged) | |
| bool | getTrackingEnabled () const |
| Get/Set what listeners to enable on the device: tracking, analogic, force, buttons. | |
| void | setTrackingEnabled (const bool status) |
| bool | getAnalogicEnabled () const |
| void | setAnalogicEnabled (const bool status) |
| bool | getButtonsEnabled () const |
| void | setButtonsEnabled (const bool status) |
| bool | getForceEnabled () const |
| void | setForceEnabled (const bool status) |
| Vec3d | getPosition () |
| Get the device position. | |
| Vec3d | getVelocity () |
| Get the device velocity. | |
| Vec3d | getAngularVelocity () |
| Get the device angular velocity. | |
| Quatd | getOrientation () |
| Get the device orientation. | |
| const Vec3d & | getOffset () const |
| Get offset from position for device end effector. | |
| const std::unordered_map< int, int > & | getButtons () const |
| Get button map. | |
| int | getButton (const int buttonId) |
| Get the state of a button returns 0 if can't find button. | |
| std::vector< double > | getAnalog () const |
| get values of the analog input | |
| double | getAnalog (int i) const |
| get single analog value More... | |
| const std::string & | getIp () |
| Get/Set the device IP. | |
| void | setIp (const std::string &ip) |
| const std::string & | getDeviceName () |
| Get/Set the device name. | |
| void | setDeviceName (const std::string &deviceName) |
| Vec3d | getForce () |
| Get/Set the device force. | |
| void | setForce (Vec3d force) |
| Public Member Functions inherited from imstk::EventObject | |
| template<typename T > | |
| void | postEvent (const T &e) |
| Emits the event Direct observers will be immediately called, in sync Queued observers will receive the Command in their queue for later execution, reciever must implement doEvent. | |
| template<typename T > | |
| void | queueEvent (const T &e) |
| Queues event directly to this. | |
| void | doEvent () |
| Do an event, if none exists return. | |
| void | doAllEvents () |
| Do all the events in the event queue. | |
| void | foreachEvent (std::function< void(Command cmd)> func) |
| Thread safe loop over all event commands, one can implement a custom handler. | |
| void | rforeachEvent (std::function< void(Command cmd)> func) |
| thread safe reverse loop over all event commands, one can implement a custom handler | |
| void | clearEvents () |
| Removes all events from queue cleans up copies of the event. | |
Protected Types | |
| enum | CommandState { WAITING =0, ACTIVE, COMPLETE } |
| Enum for current state of command. | |
Protected Member Functions | |
| void | run ()=delete |
| void | cleanUp ()=delete |
| Protected Member Functions inherited from imstk::DeviceClient | |
| DeviceClient (const std::string &name, const std::string &ip) | |
Protected Attributes | |
| friend | Command |
| double | m_dt = 0.0 |
| double | m_currentTime = 0.0 |
| bool | m_complete = false |
| std::vector< Command * > | m_commands |
| Protected Attributes inherited from imstk::DeviceClient | |
| std::string | m_deviceName |
| Device Name. | |
| std::string | m_ip |
| Connection device IP. | |
| bool | m_trackingEnabled = true |
| Tracking enabled if true. | |
| bool | m_analogicEnabled = true |
| Analogic enabled if true. | |
| bool | m_buttonsEnabled = true |
| Buttons enabled if true. | |
| bool | m_forceEnabled = false |
| Force enabled if true. | |
| Vec3d | m_position |
| Position of end effector. | |
| Vec3d | m_velocity |
| Linear velocity of end effector. | |
| Vec3d | m_angularVelocity |
| Angular velocity of the end effector. | |
| Quatd | m_orientation |
| Orientation of the end effector. | |
| Vec3d | m_force |
| Force vector. | |
| Vec3d | m_endEffectorOffset = Vec3d(0.0, 0.0, 0.0) |
| Offset from origin. | |
| std::unordered_map< int, int > | m_buttons |
| std::vector< double > | m_analogChannels |
| ParallelUtils::SpinLock | m_transformLock |
| Used for devices filling data from other threads. | |
| ParallelUtils::SpinLock | m_forceLock |
| Used for devices filling data from other threads. | |
| ParallelUtils::SpinLock | m_dataLock |
| Used for button and analog data. | |
| Protected Attributes inherited from imstk::EventObject | |
| ParallelUtils::SpinLock | eventQueueLock |
| std::deque< Command > | eventQueue |
| std::vector< std::pair< std::string, std::vector< Observer > > > | queuedObservers |
| std::vector< std::pair< std::string, std::vector< Observer > > > | directObservers |
Detailed Description
Allows setting the pose of the device from external caller without a real device connected.
Definition at line 24 of file imstkProgrammableClient.h.
Member Function Documentation
◆ addCircularMovement()
| bool imstk::ProgrammableClient::addCircularMovement | ( | Vec3d | startPos, |
| Vec3d | centerPos, | ||
| double | startTime, | ||
| double | duration | ||
| ) |
Add a circular movement command to run.
- Parameters
-
startPos starting position for movement centerPos center of circle to move around startTime time when command should activate duration time when command should be active
Definition at line 126 of file imstkProgrammableClient.cpp.

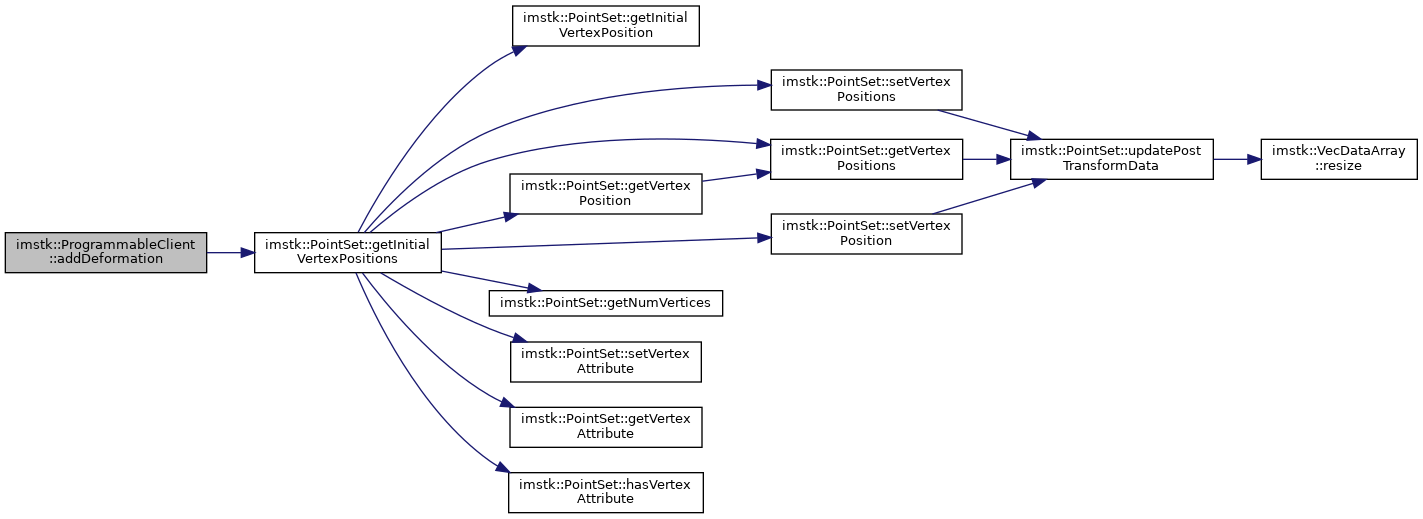
◆ addDeformation()
| bool imstk::ProgrammableClient::addDeformation | ( | std::shared_ptr< PbdObject > | object, |
| std::vector< int > | initPos, | ||
| double | strain, | ||
| DeformationType | defType, | ||
| double | poisson, | ||
| std::vector< bool > | pin, | ||
| double | startTime, | ||
| double | duration | ||
| ) |
Add a defomation command to run.
- Parameters
-
object pbdObject that contains vertices to move initPos subset of vertex's initial positions to move strain strain of deofmration DeformationType type of deforamtion to apply poisson pin vecotr of bools to control which dims to move startTime time when command should activate duration time when command should be active
Definition at line 279 of file imstkProgrammableClient.cpp.

◆ addGrasping()
| bool imstk::ProgrammableClient::addGrasping | ( | std::shared_ptr< PbdObject > | tool, |
| std::shared_ptr< PbdObjectGrasping > | objectGrasping, | ||
| double | startTime, | ||
| double | duration | ||
| ) |
Add a grasp command to run.
- Parameters
-
tool pbdObject the perfroms the grasping objectGrasping how grasping action is defined startTime time when command should activate duration time when command should be active
Definition at line 177 of file imstkProgrammableClient.cpp.

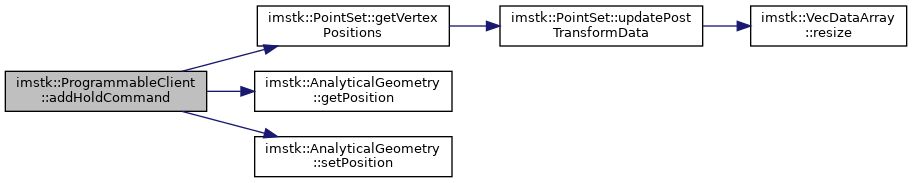
◆ addHoldCommand()
| bool imstk::ProgrammableClient::addHoldCommand | ( | std::shared_ptr< PbdObject > | object, |
| double | startTime, | ||
| double | duration, | ||
| std::vector< int > | vertexIds | ||
| ) |
Add a hold command to run.
- Parameters
-
object pbdObject that contains vertices to hold startTime time when command should activate duration time when command should be active vertexIds vecotr of vertex ids to hold
Definition at line 423 of file imstkProgrammableClient.cpp.

◆ addLinearMovement()
| bool imstk::ProgrammableClient::addLinearMovement | ( | Vec3d | startPos, |
| Vec3d | stopPos, | ||
| double | startTime, | ||
| double | duration | ||
| ) |
Add a linear movement command to run.
- Parameters
-
startPos starting position for movement stopPos ending position for movement startTime time when command should activate duration time when command should be active
Definition at line 82 of file imstkProgrammableClient.cpp.


◆ addLinearVertexMovement()
| bool imstk::ProgrammableClient::addLinearVertexMovement | ( | std::shared_ptr< PbdObject > | object, |
| std::vector< int > | vertexIds, | ||
| Vec3d | translation, | ||
| std::vector< bool > | pin, | ||
| double | startTime, | ||
| double | duration | ||
| ) |
Add a linear vertex movement command to run.
- Parameters
-
object pbdObject that contains vertices to move vertexIds subset of vertices to move translation vector of distance to move pin vecotr of booleans to control which dims to move startTime time when command should activate duration time when command should be active
Definition at line 203 of file imstkProgrammableClient.cpp.

◆ addWaitCommand()
| bool imstk::ProgrammableClient::addWaitCommand | ( | double | startTime, |
| double | duration | ||
| ) |
Add a wait command to run.
- Parameters
-
startTime time when command should activate duration time when command should be active
Definition at line 407 of file imstkProgrammableClient.cpp.

The documentation for this class was generated from the following files:
- Source/Devices/imstkProgrammableClient.h
- Source/Devices/imstkProgrammableClient.cpp
