/*
** This file is part of the Interactive Medical Simulation Toolkit (iMSTK)
** iMSTK is distributed under the Apache License, Version 2.0.
** See accompanying NOTICE for details.
*/
#include "imstkCamera.h"
#include "imstkDirectionalLight.h"
#include "imstkKeyboardDeviceClient.h"
#include "imstkKeyboardSceneControl.h"
#include "imstkLooseOctree.h"
#include "imstkMouseDeviceClient.h"
#include "imstkMouseSceneControl.h"
#include "imstkNew.h"
#include "imstkRenderMaterial.h"
#include "imstkScene.h"
#include "imstkSceneManager.h"
#include "imstkSceneObject.h"
#include "imstkSimulationManager.h"
#include "imstkSimulationUtils.h"
#include "imstkSurfaceMesh.h"
#include "imstkTextVisualModel.h"
#include "imstkVisualModel.h"
#include "imstkVTKViewer.h"
#include "OctreeDebugModel.h"
using namespace imstk;
//#define NUM_MESHES 4u
#define NUM_MESHES 10u
// Load bunny mesh data (vertex positions and triangle faces)
std::pair<std::shared_ptr<VecDataArray<double, 3>>, std::shared_ptr<VecDataArray<int, 3>>> getBunny();
static std::pair<std::shared_ptr<VecDataArray<double, 3>>, std::shared_ptr<VecDataArray<int, 3>>> g_BunnyData = getBunny();
///
/// \brief Read a mesh, create a visual scene object and add to the scene
///
std::shared_ptr<SceneObject>
createMeshObject(const std::string& objectName,
const Color& color)
{
// Create a surface mesh for the bunny
imstkNew<SurfaceMesh> surfMesh;
std::shared_ptr<VecDataArray<double, 3>> verticesPtr = std::make_shared<VecDataArray<double, 3>>();
*verticesPtr = *g_BunnyData.first;
std::shared_ptr<VecDataArray<int, 3>> indicesPtr = std::make_shared<VecDataArray<int, 3>>();
*indicesPtr = *g_BunnyData.second;
surfMesh->initialize(verticesPtr, indicesPtr);
// Create a visual model
imstkNew<VisualModel> visualModel;
visualModel->setGeometry(surfMesh);
imstkNew<RenderMaterial> material;
material->setDisplayMode(RenderMaterial::DisplayMode::WireframeSurface);
material->setColor(color); // Wireframe color
material->setLineWidth(1.0);
visualModel->setRenderMaterial(material);
imstkNew<SceneObject> visualObject(objectName);
visualObject->addVisualModel(visualModel);
return visualObject;
}
///
/// \brief Generate a random color
///
Color
getRandomColor()
{
Color color(0, 0, 0, 1);
while (true)
{
for (unsigned int i = 0; i < 3; ++i)
{
color.rgba[i] = static_cast<double>(rand()) / static_cast<double>(RAND_MAX);
}
if (color.rgba[0] > 0.95
|| color.rgba[1] > 0.95
|| color.rgba[2] > 0.95)
{
break;
}
}
return color;
}
///
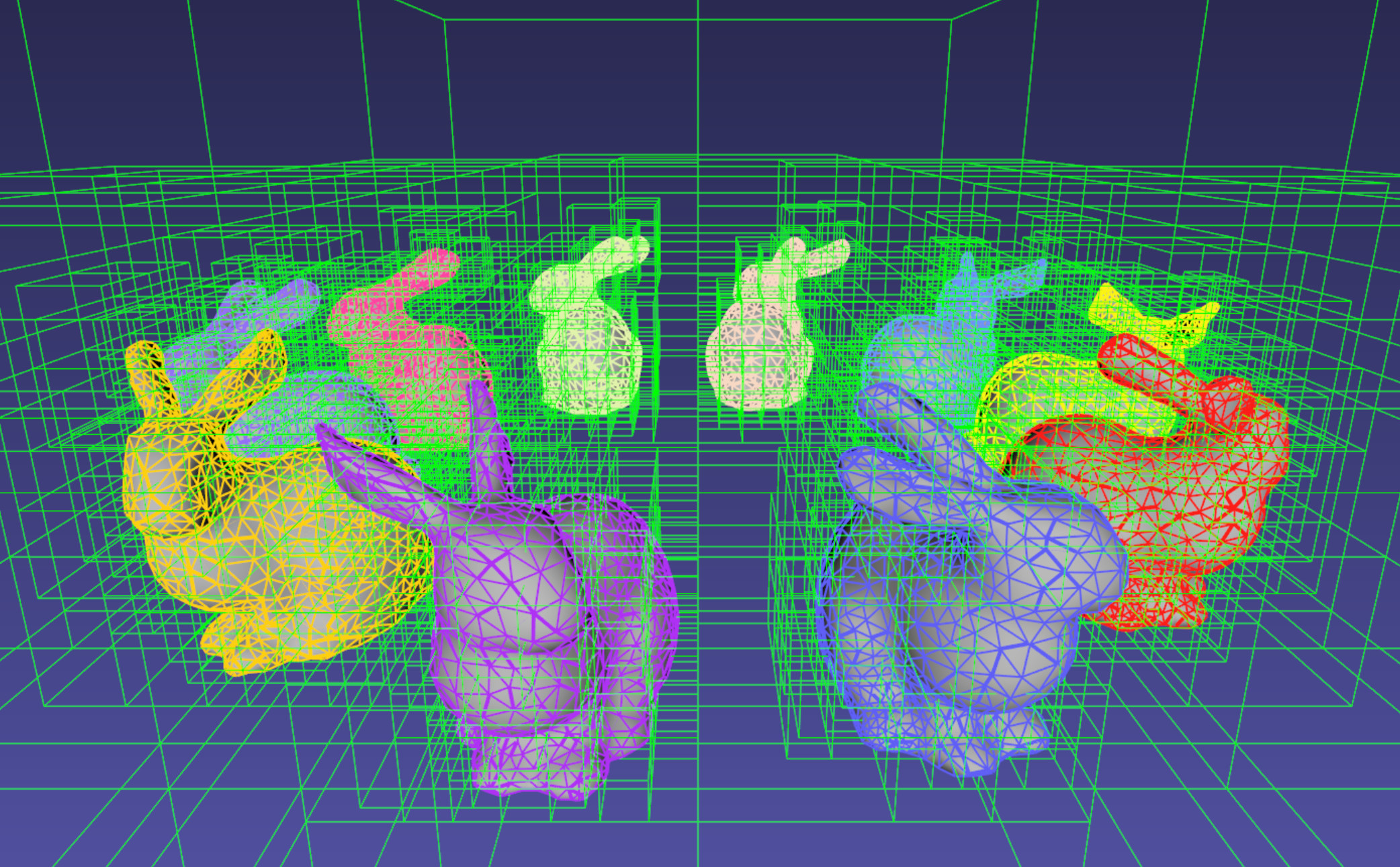
/// \brief This example demonstrates the usage of octree
///
int
main()
{
// Setup logger (write to file and stdout)
Logger::startLogger();
imstkNew<Scene> scene("Octree Example");
// Setup a viewer to render in its own thread
imstkNew<VTKViewer> viewer;
viewer->setActiveScene(scene);
viewer->setWindowTitle("Octree Example");
viewer->setSize(1920, 1080);
auto statusText = std::make_shared<TextVisualModel>("StatusText");
statusText->setFontSize(30.0);
statusText->setTextColor(Color::Orange);
statusText->setPosition(TextVisualModel::DisplayPosition::UpperLeft);
// Seed based on CPU time for random colors
srand(static_cast<unsigned int>(time(nullptr)));
// Create meshes
std::vector<std::shared_ptr<SurfaceMesh>> triMeshes;
for (unsigned int i = 0; i < NUM_MESHES; ++i)
{
std::shared_ptr<SceneObject> sceneObj = createMeshObject("Mesh-" + std::to_string(triMeshes.size()), getRandomColor());
scene->addSceneObject(sceneObj);
triMeshes.push_back(std::dynamic_pointer_cast<SurfaceMesh>(sceneObj->getVisualGeometry()));
}
// Compute the scale factor to scale meshes such that meshes with different sizes are still visualized consistently
Vec3d lowerCorner, upperCorner;
const auto pointset = std::dynamic_pointer_cast<PointSet>(triMeshes.front());
ParallelUtils::findAABB(*pointset->getVertexPositions(), lowerCorner, upperCorner);
const auto scaleFactor = 20.0 / (upperCorner - lowerCorner).norm();
for (const auto& mesh : triMeshes)
{
mesh->scale(scaleFactor, Geometry::TransformType::ApplyToData);
}
StopWatch timer;
timer.start();
// Create octree
imstkNew<LooseOctree> octree(Vec3d(0.0, 0.0, 0.0), 100.0, 0.125, 2.0, "TestOctree");
// Add all meshes to the octree
for (const auto& mesh : triMeshes)
{
octree->addTriangleMesh(mesh);
}
// Build octree after adding all geometries
octree->build();
LOG(INFO) << "Build octree time: " << timer.getTimeElapsed() << " ms";
// Always rebuild tree from scratch in each update (default update is incremental update)
// This is significantly slower than incremental update!
// octree.setAlwaysRebuild(true);
auto debugOctreeObj = std::make_shared<Entity>();
auto debugOctreeModel = debugOctreeObj->addComponent<OctreeDebugModel>();
debugOctreeModel->setInputOctree(octree);
debugOctreeModel->setLineWidth(1.0);
debugOctreeModel->setLineColor(Color::Green);
scene->addSceneObject(debugOctreeObj);
// Data for animation
const double translation = 15.0;
VecDataArray<double, 3> centers;
VecDataArray<double, 3> dirs;
for (unsigned int i = 0; i < NUM_MESHES; ++i)
{
centers.push_back(Vec3d(translation, 0, 0));
dirs.push_back(Vec3d(-1, 0, 0));
}
// Transform the mesh objects
const double angle = 2.0 * PI / NUM_MESHES;
for (unsigned int i = 0; i < NUM_MESHES; ++i)
{
const auto rotation = angle * static_cast<double>(i);
triMeshes[i]->translate(translation, 0, 1, Geometry::TransformType::ApplyToData);
triMeshes[i]->rotate(Vec3d(0, 1, 0), rotation, Geometry::TransformType::ApplyToData);
auto t = centers[i][0];
centers[i][0] = std::cos(rotation) * t;
centers[i][2] = -std::sin(rotation) * t;
t = dirs[i][0];
dirs[i][0] = std::cos(rotation) * t;
dirs[i][2] = -std::sin(rotation) * t;
}
auto updateFunc =
[&](Event*) {
// Move objects
for (size_t i = 0; i < triMeshes.size(); ++i)
{
triMeshes[i]->translate(dirs[i][0], dirs[i][1], dirs[i][2], Geometry::TransformType::ApplyToData);
centers[i] += dirs[i];
}
Vec3d lowerCorners, upperCorner;
ParallelUtils::findAABB(centers, lowerCorners, upperCorner);
if ((lowerCorners - upperCorner).norm() > 70.0)
{
for (size_t i = 0; i < static_cast<size_t>(dirs.size()); i++)
{
dirs[i] = -dirs[i]; // Change moving direction to move the objects back if they have moved too far
}
}
StopWatch timer;
timer.start();
octree->update();
const auto updateTime = timer.getTimeElapsed();
const auto numActiveNodes = octree->getNumActiveNodes();
const auto numAllocatedNodes = octree->getNumAllocatedNodes();
const auto maxNumPrimitivesInNodes = octree->getMaxNumPrimitivesInNodes();
std::stringstream ss;
ss << "Octree update time: " << updateTime << " ms\n"
<< "Active nodes: " << numActiveNodes
<< " (" << static_cast<double>(numActiveNodes) / static_cast<double>(numAllocatedNodes) * 100.0
<< " % usage / total allocated nodes: " << numAllocatedNodes << ")\n"
<< "Max number of primitives in tree nodes: " << maxNumPrimitivesInNodes;
statusText->setText(ss.str());
};
// Set Camera configuration
auto cam = scene->getActiveCamera();
cam->setPosition(Vec3d(0, 15, 50));
cam->setFocalPoint(Vec3d(0, 0, 0));
// Lights
{
imstkNew<DirectionalLight> light1;
light1->setFocalPoint(Vec3d(-1.0, -1.0, -1.0));
light1->setIntensity(1.0);
scene->addLight("light 1", light1);
imstkNew<DirectionalLight> light2;
light2->setFocalPoint(Vec3d(1.0, -1.0, -1.0));
light2->setIntensity(1.0);
scene->addLight("light 2", light2);
}
// Run the simulation
{
// Setup a scene manager to advance the scene in its own thread
imstkNew<SceneManager> sceneManager;
sceneManager->setActiveScene(scene);
sceneManager->pause(); // Start simulation paused
connect<Event>(sceneManager, &SceneManager::postUpdate, updateFunc);
imstkNew<SimulationManager> driver;
driver->addModule(viewer);
driver->addModule(sceneManager);
driver->setDesiredDt(0.05);
// Update debug visual representation every render
connect<Event>(viewer, &Viewer::preUpdate, [&](Event*)
{
// Update debug rendering data
// Involves a larger buffer update so we only do it before rendering
debugOctreeModel->debugUpdate(8, true);
});
// Add default mouse and keyboard controls to the viewer
std::shared_ptr<Entity> mouseAndKeyControls =
SimulationUtils::createDefaultSceneControl(driver);
mouseAndKeyControls->addComponent(statusText);
scene->addSceneObject(mouseAndKeyControls);
driver->start();
}
return 0;
}