/*
** This file is part of the Interactive Medical Simulation Toolkit (iMSTK)
** iMSTK is distributed under the Apache License, Version 2.0.
** See accompanying NOTICE for details.
*/
#include "imstkCamera.h"
#include "imstkControllerForceText.h"
#include "imstkDirectionalLight.h"
#include "imstkGeometryUtilities.h"
#include "imstkImageData.h"
#include "imstkKeyboardDeviceClient.h"
#include "imstkKeyboardSceneControl.h"
#include "imstkMeshIO.h"
#include "imstkMouseDeviceClient.h"
#include "imstkMouseSceneControl.h"
#include "imstkObjectControllerGhost.h"
#include "imstkPbdCollisionHandling.h"
#include "imstkPbdModel.h"
#include "imstkPbdModelConfig.h"
#include "imstkPbdObject.h"
#include "imstkPbdObjectCollision.h"
#include "imstkPbdObjectController.h"
#include "imstkPointwiseMap.h"
#include "imstkRenderMaterial.h"
#include "imstkScene.h"
#include "imstkSceneManager.h"
#include "imstkSimulationManager.h"
#include "imstkSimulationUtils.h"
#include "imstkTextVisualModel.h"
#include "imstkVTKViewer.h"
#ifdef iMSTK_USE_HAPTICS
#include "imstkDeviceManager.h"
#include "imstkDeviceManagerFactory.h"
#else
#include "imstkDummyClient.h"
#endif
using namespace imstk;
///
/// \brief Spherically project the texture coordinates
///
static void
setSphereTexCoords(std::shared_ptr<SurfaceMesh> surfMesh, const double uvScale)
{
Vec3d min, max;
surfMesh->computeBoundingBox(min, max);
const Vec3d size = max - min;
const Vec3d center = (max + min) * 0.5;
const double radius = (size * 0.5).norm();
auto uvCoordsPtr = std::make_shared<VecDataArray<float, 2>>(surfMesh->getNumVertices());
VecDataArray<float, 2>& uvCoords = *uvCoordsPtr.get();
for (int i = 0; i < surfMesh->getNumVertices(); i++)
{
Vec3d vertex = surfMesh->getVertexPosition(i) - center;
// Compute phi and theta on the sphere
const double theta = asin(vertex[0] / radius);
const double phi = atan2(vertex[1], vertex[2]);
uvCoords[i] = Vec2f(phi / (PI * 2.0) + 0.5, theta / (PI * 2.0) + 0.5) * uvScale;
}
surfMesh->setVertexTCoords("tcoords", uvCoordsPtr);
}
///
/// \brief Creates pbd simulated tissue object
/// \param name
/// \param physical dimension of tissue
/// \param dimensions of tetrahedral grid used for tissue
/// \param center of tissue block
/// \param model dynamical model the tissue should use
///
static std::shared_ptr<PbdObject>
makeTissueObj(const std::string& name,
const Vec3d& size, const Vec3i& dim, const Vec3d& center,
std::shared_ptr<PbdModel> model)
{
// Setup the Geometry
std::shared_ptr<TetrahedralMesh> tissueMesh = GeometryUtils::toTetGrid(center, size, dim);
std::shared_ptr<SurfaceMesh> surfMesh = tissueMesh->extractSurfaceMesh();
setSphereTexCoords(surfMesh, 4.0);
// Setup the material
auto material = std::make_shared<RenderMaterial>();
material->setShadingModel(RenderMaterial::ShadingModel::PBR);
auto diffuseTex = MeshIO::read<ImageData>(iMSTK_DATA_ROOT "/textures/fleshDiffuse.jpg");
material->addTexture(std::make_shared<Texture>(diffuseTex, Texture::Type::Diffuse));
auto normalTex = MeshIO::read<ImageData>(iMSTK_DATA_ROOT "/textures/fleshNormal.jpg");
material->addTexture(std::make_shared<Texture>(normalTex, Texture::Type::Normal));
auto ormTex = MeshIO::read<ImageData>(iMSTK_DATA_ROOT "/textures/fleshORM.jpg");
material->addTexture(std::make_shared<Texture>(ormTex, Texture::Type::ORM));
// Add a visual model to render the surface of the tet mesh
auto visualModel = std::make_shared<VisualModel>();
visualModel->setGeometry(surfMesh);
visualModel->setRenderMaterial(material);
// Add a visual model to render the normals of the surface
auto normalsVisualModel = std::make_shared<VisualModel>();
normalsVisualModel->setGeometry(surfMesh);
normalsVisualModel->getRenderMaterial()->setDisplayMode(RenderMaterial::DisplayMode::SurfaceNormals);
normalsVisualModel->getRenderMaterial()->setPointSize(0.5);
// Setup the Object
auto tissueObj = std::make_shared<PbdObject>(name);
tissueObj->addVisualModel(visualModel);
tissueObj->addVisualModel(normalsVisualModel);
tissueObj->setPhysicsGeometry(tissueMesh);
tissueObj->setCollidingGeometry(surfMesh);
tissueObj->setPhysicsToCollidingMap(std::make_shared<PointwiseMap>(tissueMesh, surfMesh));
tissueObj->setDynamicalModel(model);
tissueObj->getPbdBody()->uniformMassValue = 0.05;
// Fix the borders
for (int z = 0; z < dim[2]; z++)
{
for (int y = 0; y < dim[1]; y++)
{
for (int x = 0; x < dim[0]; x++)
{
if (x == 0 || /*z == 0 ||*/ x == dim[0] - 1 /*|| z == dim[2] - 1*/)
{
tissueObj->getPbdBody()->fixedNodeIds.push_back(x + dim[0] * (y + dim[1] * z));
}
}
}
}
model->getConfig()->m_femParams->m_YoungModulus = 50.0;
model->getConfig()->m_femParams->m_PoissonRatio = 0.4;
model->getConfig()->enableFemConstraint(PbdFemConstraint::MaterialType::NeoHookean);
model->getConfig()->setBodyDamping(tissueObj->getPbdBody()->bodyHandle, 0.001);
return tissueObj;
}
///
/// \brief Create pbd simulated rigid tool object
/// \param model dynamical model the tool should use
///
static std::shared_ptr<PbdObject>
makeToolObj(std::shared_ptr<PbdModel> model)
{
auto toolGeometry = std::make_shared<LineMesh>();
VecDataArray<double, 3> vertices = { Vec3d(0.0, 0.0, 0.0), Vec3d(0.0, 2.0, 0.0) };
VecDataArray<int, 2> indices = { Vec2i(0, 1) };
toolGeometry->initialize(std::make_shared<VecDataArray<double, 3>>(vertices),
std::make_shared<VecDataArray<int, 2>>(indices));
auto toolObj = std::make_shared<PbdObject>("Tool");
toolObj->setVisualGeometry(toolGeometry);
toolObj->setCollidingGeometry(toolGeometry);
toolObj->setPhysicsGeometry(toolGeometry);
toolObj->setDynamicalModel(model);
toolObj->getVisualModel(0)->getRenderMaterial()->setColor(Color::Blue);
toolObj->getVisualModel(0)->getRenderMaterial()->setDisplayMode(RenderMaterial::DisplayMode::Wireframe);
toolObj->getVisualModel(0)->getRenderMaterial()->setBackFaceCulling(false);
toolObj->getVisualModel(0)->getRenderMaterial()->setLineWidth(10.0);
model->getConfig()->setBodyDamping(toolObj->getPbdBody()->bodyHandle, 0.05, 0.0);
toolObj->getPbdBody()->setRigid(Vec3d(0.0, 0.8, 0.0), // Position
0.2, // Mass
Quatd::Identity(), // Orientation
Mat3d::Identity() * 10.0); // Inertia
// Add a component for controlling via a device
auto controller = toolObj->addComponent<PbdObjectController>();
controller->setControlledObject(toolObj);
controller->setLinearKs(5000.0);
controller->setAngularKs(10000.0);
controller->setUseCritDamping(true);
controller->setForceScaling(0.0025);
controller->setUseForceSmoothening(true);
// Add extra component to tool for the ghost
auto controllerGhost = toolObj->addComponent<ObjectControllerGhost>();
controllerGhost->setController(controller);
return toolObj;
}
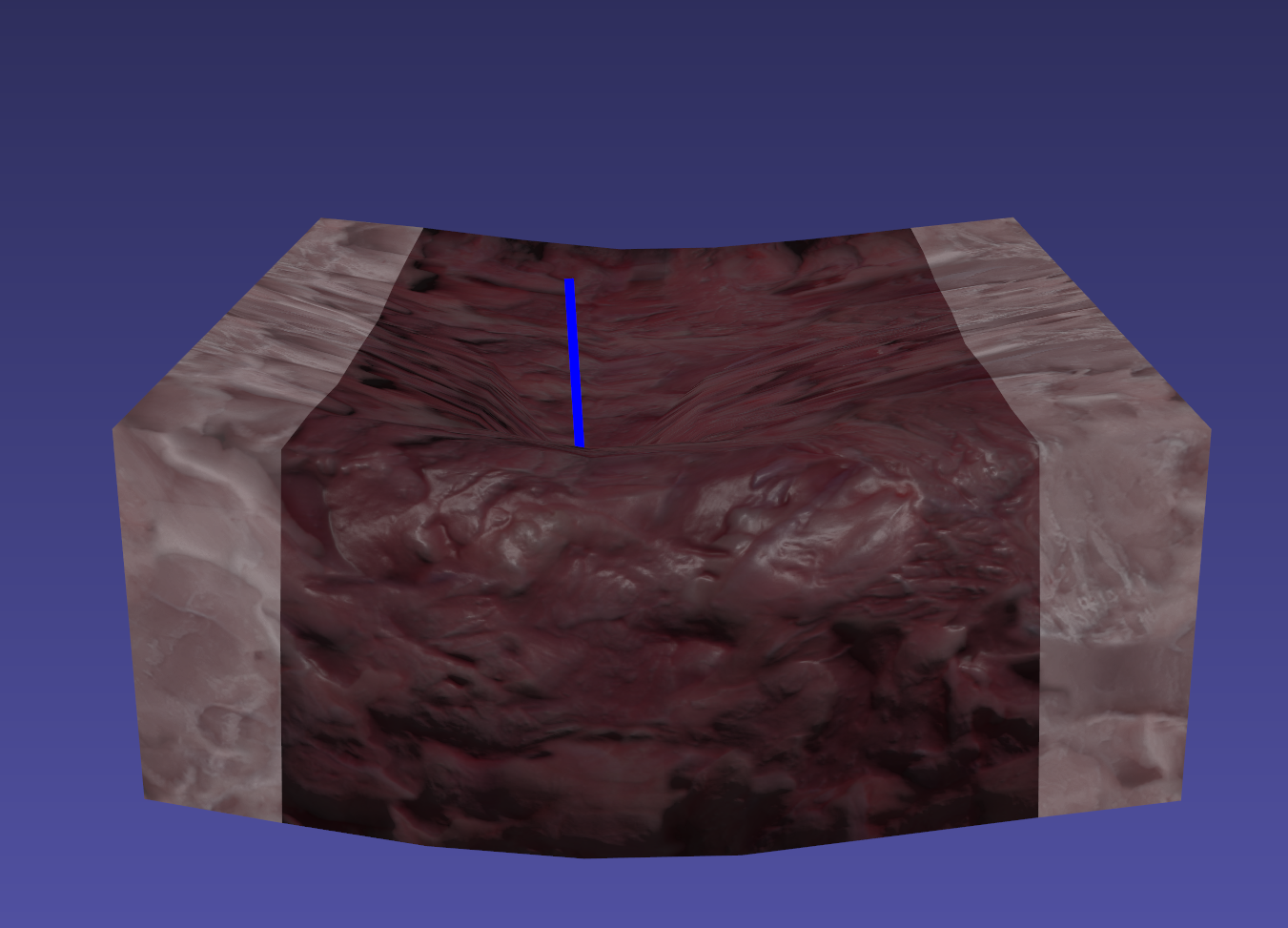
///
/// \brief This example demonstrates two-way collision interaction with a 3d
/// xpbd simulated tool and tissue (tetrahedral). With proper compliance.
///
/// If imstk is built with haptics a force is rendered. Otherwise mouse controls
/// are used. This example is currently not too scale, a force scaling is used.
///
int
main()
{
// Setup logger (write to file and stdout)
Logger::startLogger();
// Setup the scene
auto scene = std::make_shared<Scene>("PbdTissueContact");
scene->getActiveCamera()->setPosition(0.12, 4.51, 16.51);
scene->getActiveCamera()->setFocalPoint(0.0, 0.0, 0.0);
scene->getActiveCamera()->setViewUp(0.0, 0.96, -0.28);
// Setup the Model/System
auto pbdModel = std::make_shared<PbdModel>();
pbdModel->getConfig()->m_doPartitioning = false;
pbdModel->getConfig()->m_gravity = Vec3d(0.0, 0.0, 0.0);
pbdModel->getConfig()->m_dt = 0.05;
pbdModel->getConfig()->m_iterations = 5;
// Setup a tissue
std::shared_ptr<PbdObject> tissueObj = makeTissueObj("Tissue",
Vec3d(8.0, 2.0, 8.0), Vec3i(6, 5, 6), Vec3d(0.0, -1.0, 0.0), pbdModel);
scene->addSceneObject(tissueObj);
// Setup a tool
std::shared_ptr<PbdObject> toolObj = makeToolObj(pbdModel);
scene->addSceneObject(toolObj);
// Setup a collision
auto collision = std::make_shared<PbdObjectCollision>(tissueObj, toolObj);
//std::dynamic_pointer_cast<ClosedSurfaceMeshToMeshCD>(collision->getCollisionDetection())->setGenerateEdgeEdgeContacts(true);
scene->addInteraction(collision);
// Light
auto light = std::make_shared<DirectionalLight>();
light->setFocalPoint(Vec3d(5.0, -8.0, -5.0));
light->setIntensity(1.0);
scene->addLight("Light", light);
// Run the simulation
{
// Setup a viewer to render
auto viewer = std::make_shared<VTKViewer>();
viewer->setActiveScene(scene);
viewer->setVtkLoggerMode(VTKViewer::VTKLoggerMode::MUTE);
// Setup a scene manager to advance the scene
auto sceneManager = std::make_shared<SceneManager>();
sceneManager->setActiveScene(scene);
sceneManager->pause(); // Start simulation paused
auto driver = std::make_shared<SimulationManager>();
driver->addModule(viewer);
driver->addModule(sceneManager);
driver->setDesiredDt(0.001);
auto controller = toolObj->getComponent<PbdObjectController>();
#ifdef iMSTK_USE_HAPTICS
// Setup default haptics manager
std::shared_ptr<DeviceManager> hapticManager = DeviceManagerFactory::makeDeviceManager();
std::shared_ptr<DeviceClient> deviceClient = hapticManager->makeDeviceClient();
driver->addModule(hapticManager);
controller->setTranslationScaling(50.0);
if (hapticManager->getTypeName() == "HaplyDeviceManager")
{
controller->setTranslationOffset(Vec3d(5.0, -5.0, 0.0));
}
#else
auto deviceClient = std::make_shared<DummyClient>();
connect<Event>(sceneManager, &SceneManager::postUpdate, [&](Event*)
{
const Vec2d mousePos = viewer->getMouseDevice()->getPos();
const Vec3d worldPos = Vec3d(mousePos[0] - 0.5, mousePos[1] - 0.5, 0.0) * 10.0;
deviceClient->setPosition(worldPos);
});
controller->setTranslationScaling(1.0);
#endif
controller->setDevice(deviceClient);
connect<Event>(sceneManager, &SceneManager::preUpdate, [&](Event*)
{
// Keep the tool moving in real time
pbdModel->getConfig()->m_dt = sceneManager->getDt();
});
// Add default mouse and keyboard controls to the viewer
std::shared_ptr<Entity> mouseAndKeyControls =
SimulationUtils::createDefaultSceneControl(driver);
// Add something to display controller force
auto controllerForceTxt = mouseAndKeyControls->addComponent<ControllerForceText>();
controllerForceTxt->setController(controller);
controllerForceTxt->setCollision(collision);
scene->addSceneObject(mouseAndKeyControls);
driver->start();
}
return 0;
}