/*
** This file is part of the Interactive Medical Simulation Toolkit (iMSTK)
** iMSTK is distributed under the Apache License, Version 2.0.
** See accompanying NOTICE for details.
*/
#include "imstkCamera.h"
#include "imstkControllerForceText.h"
#include "imstkDebugGeometryModel.h"
#include "imstkDirectionalLight.h"
#include "imstkGeometryUtilities.h"
#include "imstkIsometricMap.h"
#include "imstkKeyboardDeviceClient.h"
#include "imstkKeyboardSceneControl.h"
#include "imstkMeshIO.h"
#include "imstkMouseDeviceClient.h"
#include "imstkMouseSceneControl.h"
#include "imstkObjectControllerGhost.h"
#include "imstkPbdCollisionHandling.h"
#include "imstkPbdContactConstraint.h"
#include "imstkPbdModel.h"
#include "imstkPbdModelConfig.h"
#include "imstkPbdObject.h"
#include "imstkPbdObjectController.h"
#include "imstkPointwiseMap.h"
#include "imstkPuncturable.h"
#include "imstkRenderMaterial.h"
#include "imstkScene.h"
#include "imstkSceneManager.h"
#include "imstkSimulationManager.h"
#include "imstkSimulationUtils.h"
#include "imstkStraightNeedle.h"
#include "imstkTextVisualModel.h"
#include "imstkVTKViewer.h"
#include "NeedleEmbedder.h"
#include "NeedleInteraction.h"
#ifdef iMSTK_USE_HAPTICS
#include "imstkDeviceManager.h"
#include "imstkDeviceManagerFactory.h"
#else
#include "imstkDummyClient.h"
#endif
using namespace imstk;
///
/// \brief Given a child mesh, find all the vertices of the parent that
/// are coincident to the child.
///
static std::vector<int>
computeFixedPtsViaMap(std::shared_ptr<PointSet> parent,
std::shared_ptr<PointSet> child,
const double tolerance = 0.00001)
{
std::vector<int> fixedPts;
auto map = std::make_shared<PointwiseMap>();
map->setParentGeometry(parent);
map->setChildGeometry(child);
map->setTolerance(tolerance);
map->compute();
fixedPts.reserve(child->getNumVertices());
for (int i = 0; i < child->getNumVertices(); i++)
{
fixedPts.push_back(map->getParentVertexId(i));
}
return fixedPts;
}
///
/// \brief Creates PBD tetrahedral simulated tissue
/// \param name The name of the object
/// \param model The DynamicalModel to use
///
static std::shared_ptr<PbdObject>
makeTissueObj(const std::string& name,
std::shared_ptr<PbdModel> model,
std::shared_ptr<TetrahedralMesh> tissueMesh)
{
// Setup the Geometry
std::shared_ptr<SurfaceMesh> surfMesh = tissueMesh->extractSurfaceMesh();
// Setup the material
auto material = std::make_shared<RenderMaterial>();
material->setDisplayMode(RenderMaterial::DisplayMode::WireframeSurface);
material->setBackFaceCulling(false);
material->setOpacity(0.5);
// Setup the Object
auto tissueObj = std::make_shared<PbdObject>(name);
tissueObj->setVisualGeometry(surfMesh);
tissueObj->getVisualModel(0)->setRenderMaterial(material);
tissueObj->setPhysicsGeometry(tissueMesh);
tissueObj->setCollidingGeometry(surfMesh);
tissueObj->setPhysicsToCollidingMap(std::make_shared<PointwiseMap>(tissueMesh, surfMesh));
tissueObj->setDynamicalModel(model);
tissueObj->getPbdBody()->uniformMassValue = 0.04;
// \todo: iMSTK doesn't support multiple different materials for FEM tet constraints without
// making the functor yourself
auto functor = std::make_shared<PbdFemTetConstraintFunctor>();
functor->setGeometry(tissueMesh);
functor->setBodyIndex(tissueObj->getPbdBody()->bodyHandle);
const double youngsModulus = 100000.0;
const double poissonRatio = 0.48;
auto constraintConfig = std::make_shared<PbdFemConstraintConfig>(
youngsModulus / 2.0 / (1.0 + poissonRatio),
youngsModulus * poissonRatio / ((1.0 + poissonRatio) * (1.0 - 2.0 * poissonRatio)),
youngsModulus,
poissonRatio);
functor->setFemConfig(constraintConfig);
functor->setMaterialType(PbdFemConstraint::MaterialType::StVK);
model->getConfig()->addPbdConstraintFunctor(functor);
tissueObj->addComponent<Puncturable>();
return tissueObj;
}
static std::shared_ptr<PbdObject>
makeNeedleObj(const std::string& name,
std::shared_ptr<PbdModel> model)
{
auto toolObj = std::make_shared<PbdObject>(name);
auto toolGeometry = std::make_shared<LineMesh>();
auto verticesPtr = std::make_shared<VecDataArray<double, 3>>(2);
(*verticesPtr)[0] = Vec3d(0.0, 0.0, 0.0);
(*verticesPtr)[1] = Vec3d(0.0, 0.0, 0.25);
auto indicesPtr = std::make_shared<VecDataArray<int, 2>>(1);
(*indicesPtr)[0] = Vec2i(0, 1);
toolGeometry->initialize(verticesPtr, indicesPtr);
auto trocarMesh = MeshIO::read<SurfaceMesh>(iMSTK_DATA_ROOT "/Surgical Instruments/LapTool/trocar.obj");
toolObj->setVisualGeometry(trocarMesh);
toolObj->setCollidingGeometry(toolGeometry);
toolObj->setPhysicsGeometry(toolGeometry);
toolObj->setPhysicsToVisualMap(std::make_shared<IsometricMap>(toolGeometry, trocarMesh));
toolObj->getVisualModel(0)->getRenderMaterial()->setColor(Color(0.9, 0.9, 0.9));
toolObj->getVisualModel(0)->getRenderMaterial()->setShadingModel(RenderMaterial::ShadingModel::PBR);
toolObj->getVisualModel(0)->getRenderMaterial()->setRoughness(0.5);
toolObj->getVisualModel(0)->getRenderMaterial()->setMetalness(1.0);
toolObj->getVisualModel(0)->getRenderMaterial()->setIsDynamicMesh(false);
toolObj->setDynamicalModel(model);
toolObj->getPbdBody()->setRigid(
Vec3d(0.0, 1.0, 0.0), // Position
1.0, // Mass
Quatd::Identity(), // Orientation
Mat3d::Identity() * 10000.0); // Inertia
// Add a component for needle puncturing
auto needle = toolObj->addComponent<StraightNeedle>();
needle->setNeedleGeometry(toolGeometry);
// Add a component for controlling via another device
auto controller = toolObj->addComponent<PbdObjectController>();
controller->setControlledObject(toolObj);
controller->setLinearKs(20000.0);
controller->setAngularKs(8000000.0);
controller->setUseCritDamping(true);
controller->setForceScaling(0.05);
controller->setSmoothingKernelSize(15);
controller->setUseForceSmoothening(true);
// Add extra component to tool for the ghost
auto controllerGhost = toolObj->addComponent<ObjectControllerGhost>();
controllerGhost->setUseForceFade(true);
controllerGhost->setController(controller);
return toolObj;
}
static void
updateDebugGeom(std::shared_ptr<NeedleInteraction> interaction,
std::shared_ptr<DebugGeometryModel> debugGeomObj)
{
auto needleEmbedder = std::dynamic_pointer_cast<NeedleEmbedder>(interaction->getEmbedder());
const std::vector<Vec3d>& debugEmbeddingPts = needleEmbedder->m_debugEmbeddingPoints;
const std::vector<Vec3i>& debugEmbeddingTris = needleEmbedder->m_debugEmbeddedTriangles;
debugGeomObj->clear();
for (size_t i = 0; i < debugEmbeddingPts.size(); i++)
{
debugGeomObj->addPoint(debugEmbeddingPts[i]);
}
std::shared_ptr<PbdObject> tissueObj = interaction->getEmbedder()->getTissueObject();
auto verticesPtr = std::dynamic_pointer_cast<TetrahedralMesh>(tissueObj->getPhysicsGeometry())->getVertexPositions();
VecDataArray<double, 3>& vertices = *verticesPtr;
for (size_t i = 0; i < debugEmbeddingTris.size(); i++)
{
debugGeomObj->addTriangle(
vertices[debugEmbeddingTris[i][0]],
vertices[debugEmbeddingTris[i][1]],
vertices[debugEmbeddingTris[i][2]]);
}
}
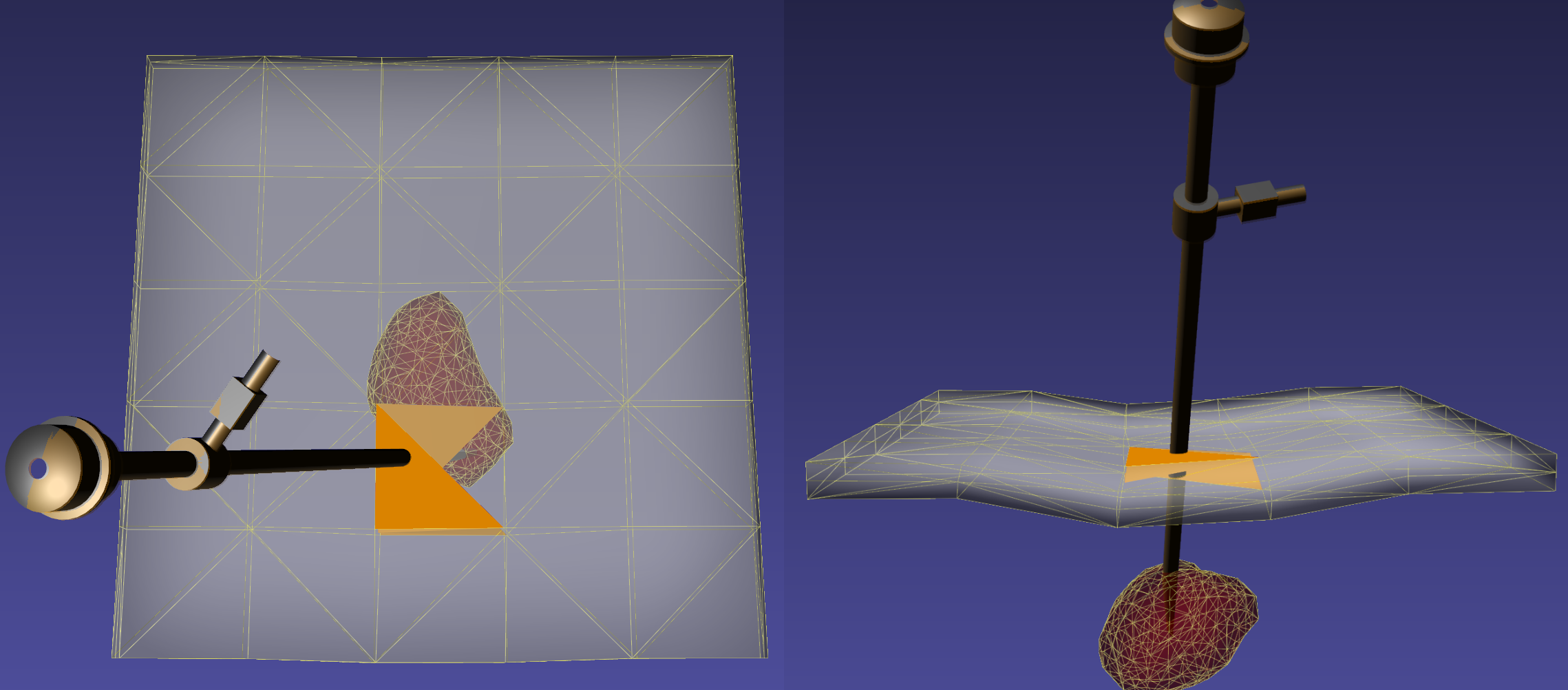
///
/// \brief This example demonstrates two-way linear tissue needle contact
/// with a tetrahedral mesh. No torques rendered. Constraints are used at
/// the tetrahedrons faces of intersection.
///
int
main()
{
// Setup logger (write to file and stdout)
Logger::startLogger();
// Setup the scene
auto scene = std::make_shared<Scene>("PbdTissueVolumeNeedleContact");
scene->getActiveCamera()->setPosition(0.0, 0.412873, 0.102441);
scene->getActiveCamera()->setFocalPoint(0.0, -0.0, -0.0);
scene->getActiveCamera()->setViewUp(0.0, 0.242952, -0.969977);
scene->getConfig()->debugCamBoundingBox = false;
*scene->getCamera("debug") = *scene->getActiveCamera();
// Setup the Model
auto pbdModel = std::make_shared<PbdModel>();
pbdModel->getConfig()->m_doPartitioning = false;
pbdModel->getConfig()->m_dt = 0.001; // realtime used in update calls later in main
pbdModel->getConfig()->m_iterations = 1; // Prefer small timestep over iterations
pbdModel->getConfig()->m_gravity = Vec3d(0.0, 0.0, 0.0);
// Setup a tissue with surface collision geometry
const Vec3i dim = Vec3i(6, 3, 6);
auto tetGridMesh = GeometryUtils::toTetGrid(
Vec3d(0.0, 0.0, 0.0), // Center
Vec3d(0.2, 0.01, 0.2), // Size (meters)
dim); // Dimensions
std::shared_ptr<PbdObject> tissueObj = makeTissueObj("PbdTissue1", pbdModel, tetGridMesh);
// Fix the borders
for (int z = 0; z < dim[2]; z++)
{
for (int y = 0; y < dim[1]; y++)
{
for (int x = 0; x < dim[0]; x++)
{
if (x == 0 || /*z == 0 ||*/ x == dim[0] - 1 /*|| z == dim[2] - 1*/)
{
tissueObj->getPbdBody()->fixedNodeIds.push_back(x + dim[0] * (y + dim[1] * z));
}
}
}
}
scene->addSceneObject(tissueObj);
auto tetMesh = MeshIO::read<TetrahedralMesh>(iMSTK_DATA_ROOT "/Organs/Kidney/kidney_vol_low_rez.vtk");
tetMesh->translate(Vec3d(0.0, -0.07, -0.05), Geometry::TransformType::ApplyToData);
std::shared_ptr<PbdObject> tissueObj2 = makeTissueObj("PbdTissue2", pbdModel, tetMesh);
auto fixedPtMesh = MeshIO::read<PointSet>(iMSTK_DATA_ROOT "/Organs/Kidney/kidney_fixedpts_low_rez.obj");
fixedPtMesh->translate(Vec3d(0.0, -0.07, -0.05), Geometry::TransformType::ApplyToData);
tissueObj2->getPbdBody()->fixedNodeIds = computeFixedPtsViaMap(tetMesh, fixedPtMesh, 0.001);
tissueObj2->getVisualModel(0)->getRenderMaterial()->setColor(Color::Blood);
scene->addSceneObject(tissueObj2);
// Setup a tool for the user to move
std::shared_ptr<PbdObject> toolObj = makeNeedleObj("PbdNeedle", pbdModel);
auto debugGeom = toolObj->addComponent<DebugGeometryModel>();
debugGeom->setLineWidth(0.1);
scene->addSceneObject(toolObj);
// This adds both contact and puncture functionality
auto interaction = std::make_shared<NeedleInteraction>(tissueObj, toolObj);
interaction->setPunctureForceThreshold(3.0);
interaction->setNeedleCompliance(0.000001);
interaction->setFriction(0.1);
scene->addInteraction(interaction);
// This adds both contact and puncture functionality
auto interaction2 = std::make_shared<NeedleInteraction>(tissueObj2, toolObj);
interaction2->setPunctureForceThreshold(3.0);
interaction2->setNeedleCompliance(0.000001);
interaction2->setFriction(0.1);
scene->addInteraction(interaction2);
// Light
auto light = std::make_shared<DirectionalLight>();
light->setFocalPoint(Vec3d(5.0, -8.0, -5.0));
light->setIntensity(1.0);
scene->addLight("Light", light);
// Run the simulation
{
// Setup a viewer to render
auto viewer = std::make_shared<VTKViewer>();
viewer->setActiveScene(scene);
viewer->setVtkLoggerMode(VTKViewer::VTKLoggerMode::MUTE);
viewer->setDebugAxesLength(0.1, 0.1, 0.1);
// Setup a scene manager to advance the scene
auto sceneManager = std::make_shared<SceneManager>();
sceneManager->setActiveScene(scene);
sceneManager->pause(); // Start simulation paused
auto driver = std::make_shared<SimulationManager>();
driver->addModule(viewer);
driver->addModule(sceneManager);
driver->setDesiredDt(0.001); // 1ms, 1000hz
auto controller = toolObj->getComponent<PbdObjectController>();
#ifdef iMSTK_USE_HAPTICS
// Setup default haptics manager
std::shared_ptr<DeviceManager> hapticManager = DeviceManagerFactory::makeDeviceManager();
std::shared_ptr<DeviceClient> deviceClient = hapticManager->makeDeviceClient();
driver->addModule(hapticManager);
if (hapticManager->getTypeName() == "HaplyDeviceManager")
{
controller->setTranslationOffset(Vec3d(0.125, -0.07, 0.0));
}
#else
auto deviceClient = std::make_shared<DummyClient>();
connect<Event>(sceneManager, &SceneManager::postUpdate,
[&](Event*)
{
const Vec2d mousePos = viewer->getMouseDevice()->getPos();
const Vec3d desiredPos = Vec3d(mousePos[0] - 0.5, mousePos[1] - 0.5, 0.0) * 0.1;
const Quatd desiredOrientation = Quatd(Rotd(0.0, Vec3d(1.0, 0.0, 0.0)));
deviceClient->setPosition(desiredPos);
deviceClient->setOrientation(desiredOrientation);
});
#endif
controller->setDevice(deviceClient);
int counter = 0;
connect<Event>(viewer, &VTKViewer::preUpdate,
[&](Event*)
{
// Copy constraint faces and points to debug geometry for display
updateDebugGeom(interaction, debugGeom);
});
connect<Event>(sceneManager, &SceneManager::preUpdate,
[&](Event*)
{
// Keep the tool moving in real time
pbdModel->getConfig()->m_dt = sceneManager->getDt();
});
// Add default mouse and keyboard controls to the viewer
std::shared_ptr<Entity> mouseAndKeyControls =
SimulationUtils::createDefaultSceneControl(driver);
// Add something to display controller force
auto controllerForceTxt = mouseAndKeyControls->addComponent<ControllerForceText>();
controllerForceTxt->setController(controller);
controllerForceTxt->setCollision(interaction);
scene->addSceneObject(mouseAndKeyControls);
driver->start();
}
return 0;
}